Multi pedal vehicles
This thread discussed the reasoning behind the choice of a multi pedal vehicle.
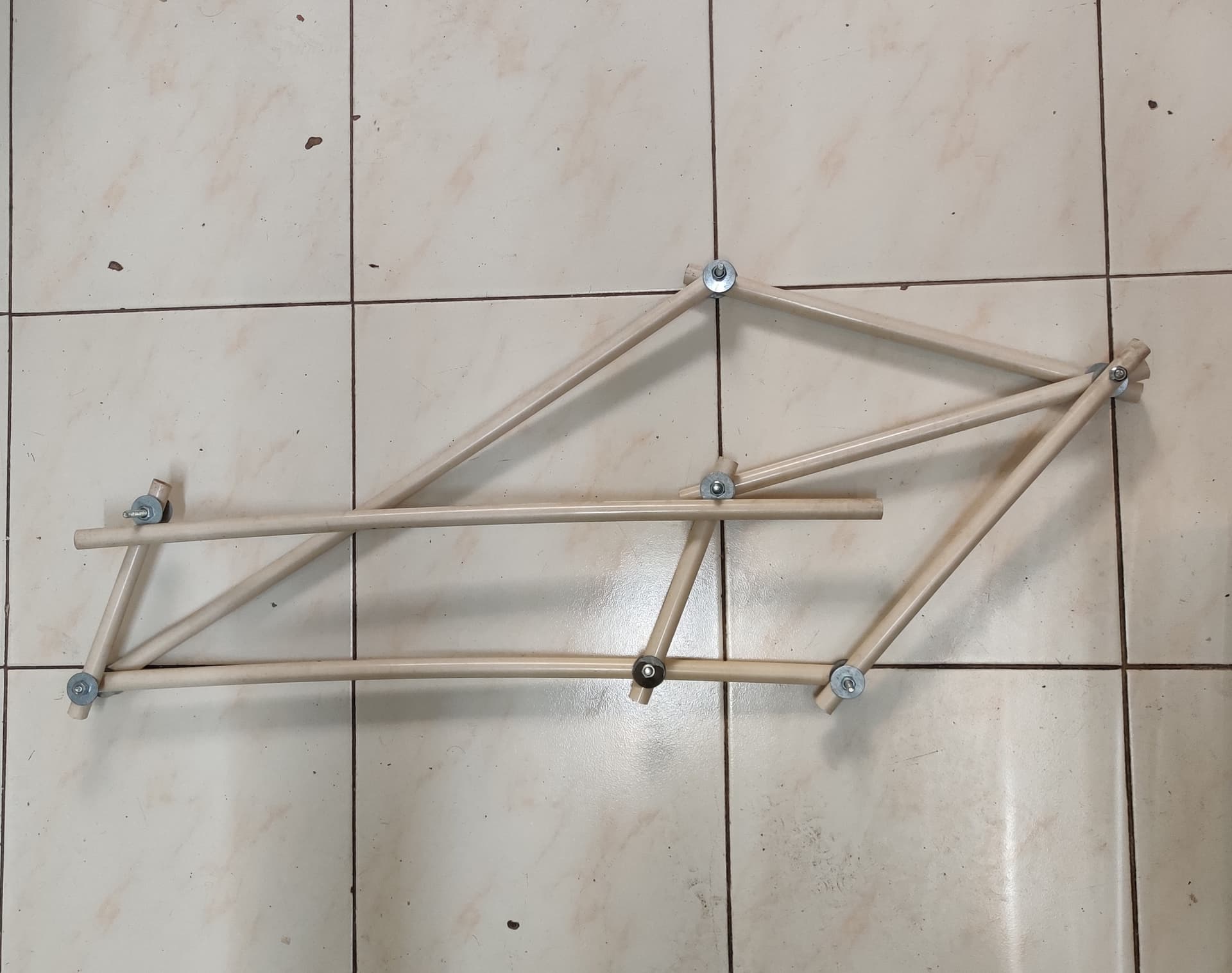
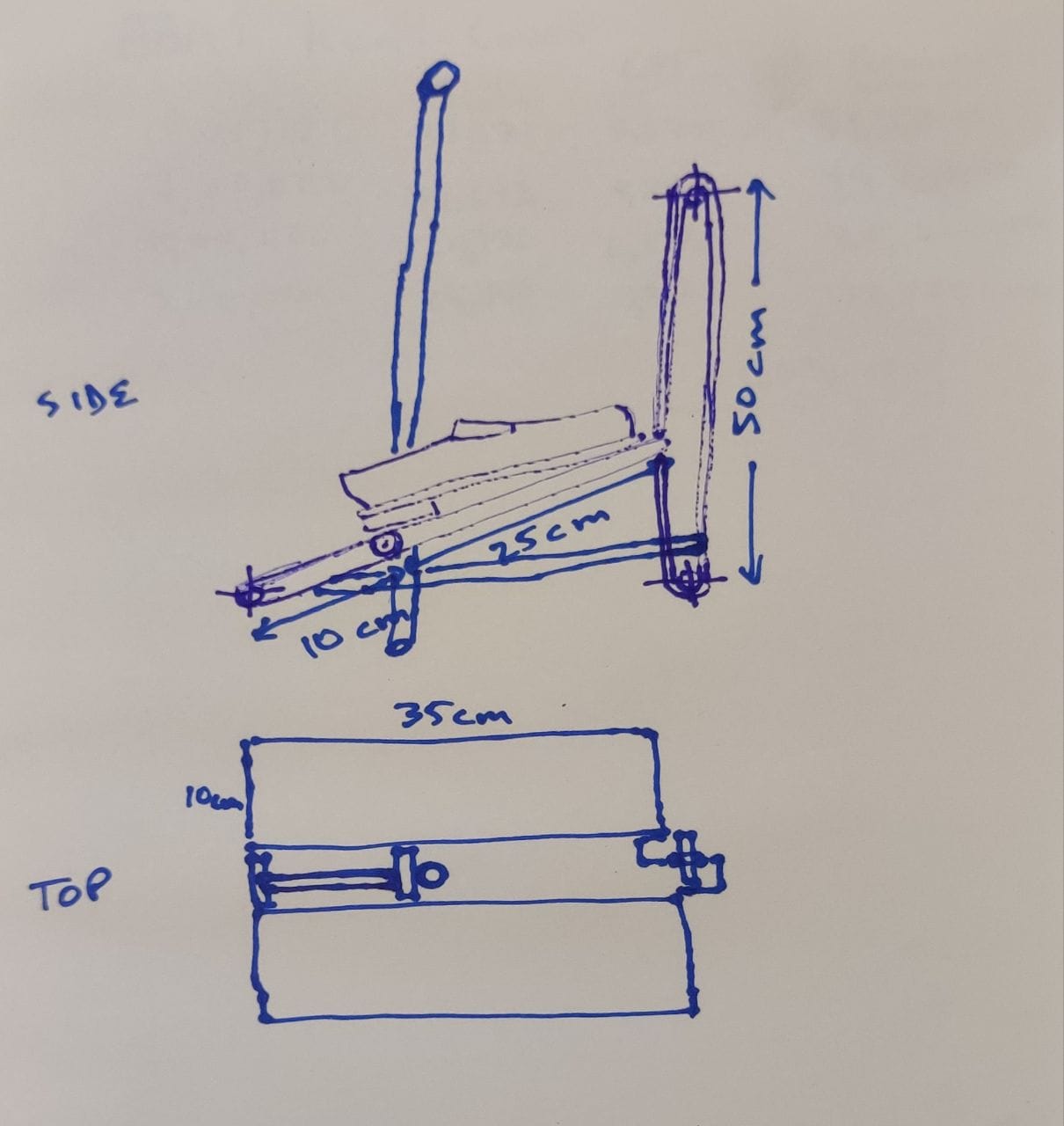
The following thread explores the construction of such a device.
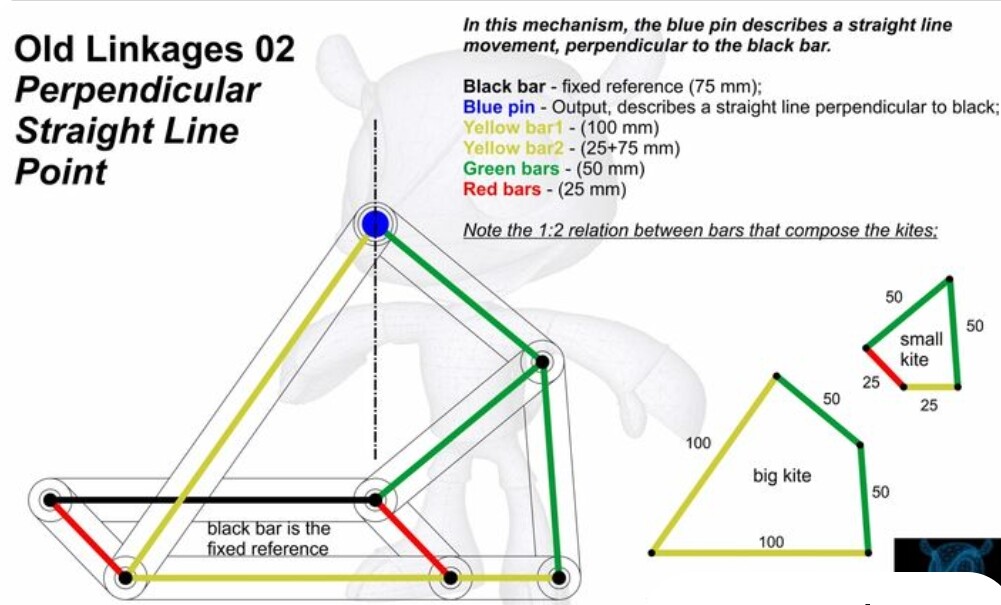
An important physical reality to be kept in mind is that the locus of a circle is the equal movement of two points oscillating along perpendicular axes, for fixed and equal distances.
Applied to pedal movement, this means that in order to emulate the motion of a wheel, two identical linear actuators need to be fixed perpendicular to each other, and to move in perfect tandem.
However, in the real world, once the choice of legs is made, there is no longer any reason to actually emulate a wheel, that is, to describe a full circle. Instead, an elongated oblong will do the needful, to provide a horizontal platform the ability to move level with a horizontal surface.
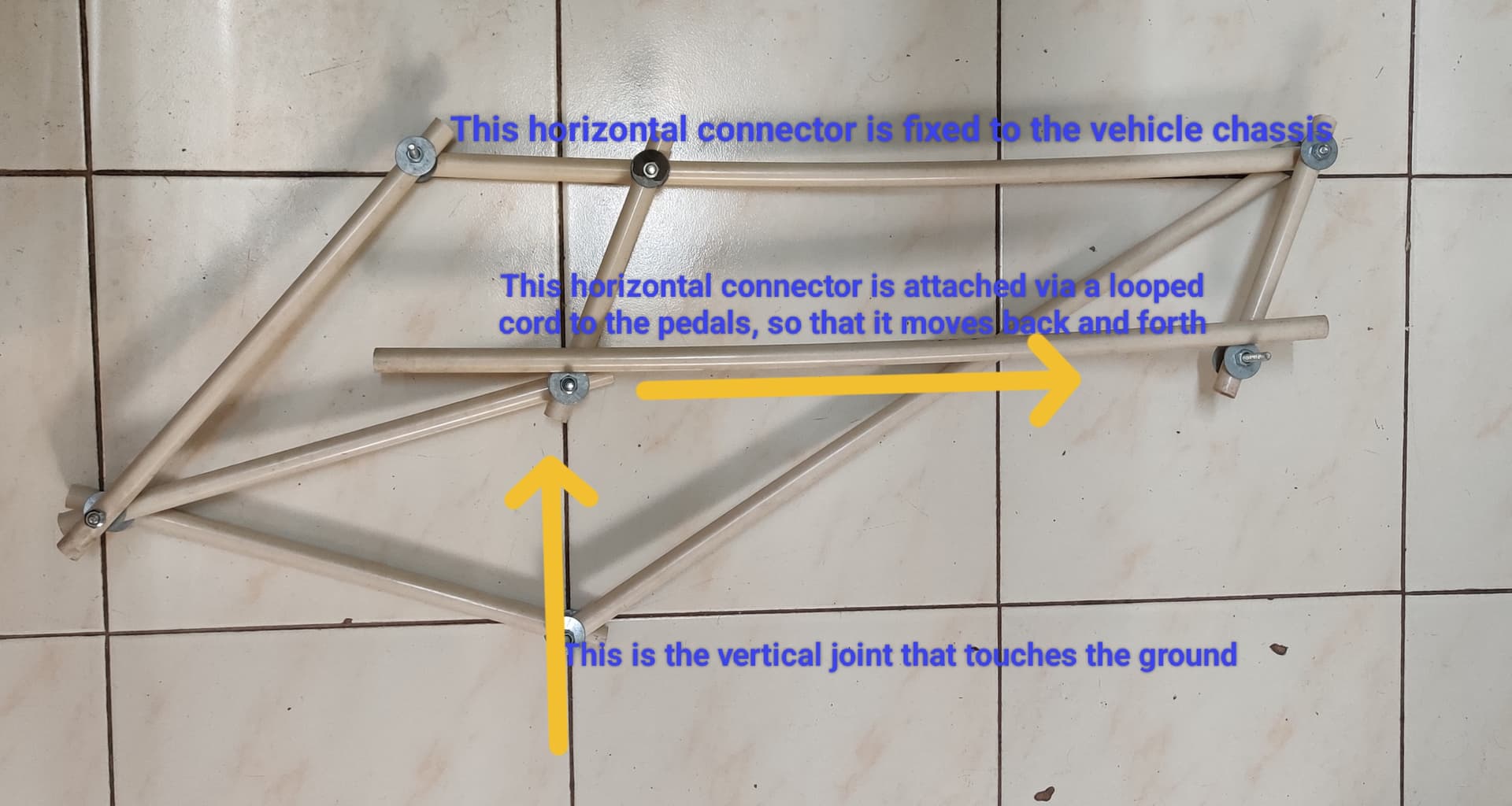
This means that the horizontal actuator needs to describe the full cycle, while the vertical actuator needs only to move the minimum distance that will ensure that the horizontal platform (the purpose for which this device is being described, and for which the prototype will be built) will not collide with the maximum unevenness of the ground over which the vehicle will move.
Modern sedan cars are designed for a chassis clearance of 17cm, while consumer off-road vehicles are designed for 20-25 cm. This is not a rule, but is certainly useful as a guide to designing a practical vehicle.
There is a second practical phenomenon that comes in useful for designing such a vehicle. This is the delivery of a comfort factor, for a passenger in such a vehicle. This comfort factor, the equivalent of the rolling movement of a wheel, is ensured by combining the action of 3 to 4 legs moving equal arcs that, in combination, add up to 360°. With 3 legs, the motion of each one is 120°, and with 4, each one is 90°.
In the earlier discussion, the minimum number of such assemblies needed to create useful vehicles is 4, in order not to have to take extraordinary care in locating the load that will be borne by the vehicle, whether it is just a single person, several persons, or one or more persons carrying baggage. Naturally, this is a minimum, as more such assemblies will continue to add stability and to decrease the energy load of each assembly, and the individual components of each assembly.
However, I’m suggesting here that the first prototype should have just 4 assemblies, to minimise the probable cost of the devices. To some extent, in fact, using many multiple assemblies will lower the cost of each one, but this will probably not happen to any productive extent, until the design is transformed into production of standardised units.
The next element of design for consideration is the prime mover.