“The walls between art and engineering exist only in our minds.” -Theo Jansen
Theo Jansen has been creating strandbeest ( “beach beasts”) since 1990. These are moving kinetic structures that resemble walking animals or in simple words - wind-driven walking machines! The basic system is made using two triangles with two quadrilaterals along. Here is a video showing the evolution of strandbeest.
“I make skeletons that are able to walk on the wind. Over time, these skeletons have become increasingly better at surviving the elements such as storms and water and eventually I want to put these animals out in herds on the beaches, so they will live their own lives.”
So, how does Jansen’s linkage look like? You can explore the below link to know more.
Jansen’s linkage
It’s a planar leg mechanism
Used in a variety of kinetic sculptor conceptualized by Theo Jansen
It simulates smooth walking mechanism using a simple rotary input
Application: mobile robotics, gait analysis
Mechanism has only 1-DoF ( degree of freedom)
There are innumerable projects which are out in open-source made using this mechanism. However, as much magnificent and fascinating it looks in animation or while looking at various videos of other projects, it will be even awesome if one can attempt to make something leveraging the mechanism to give us a deeper sense of how does the mechanism works.
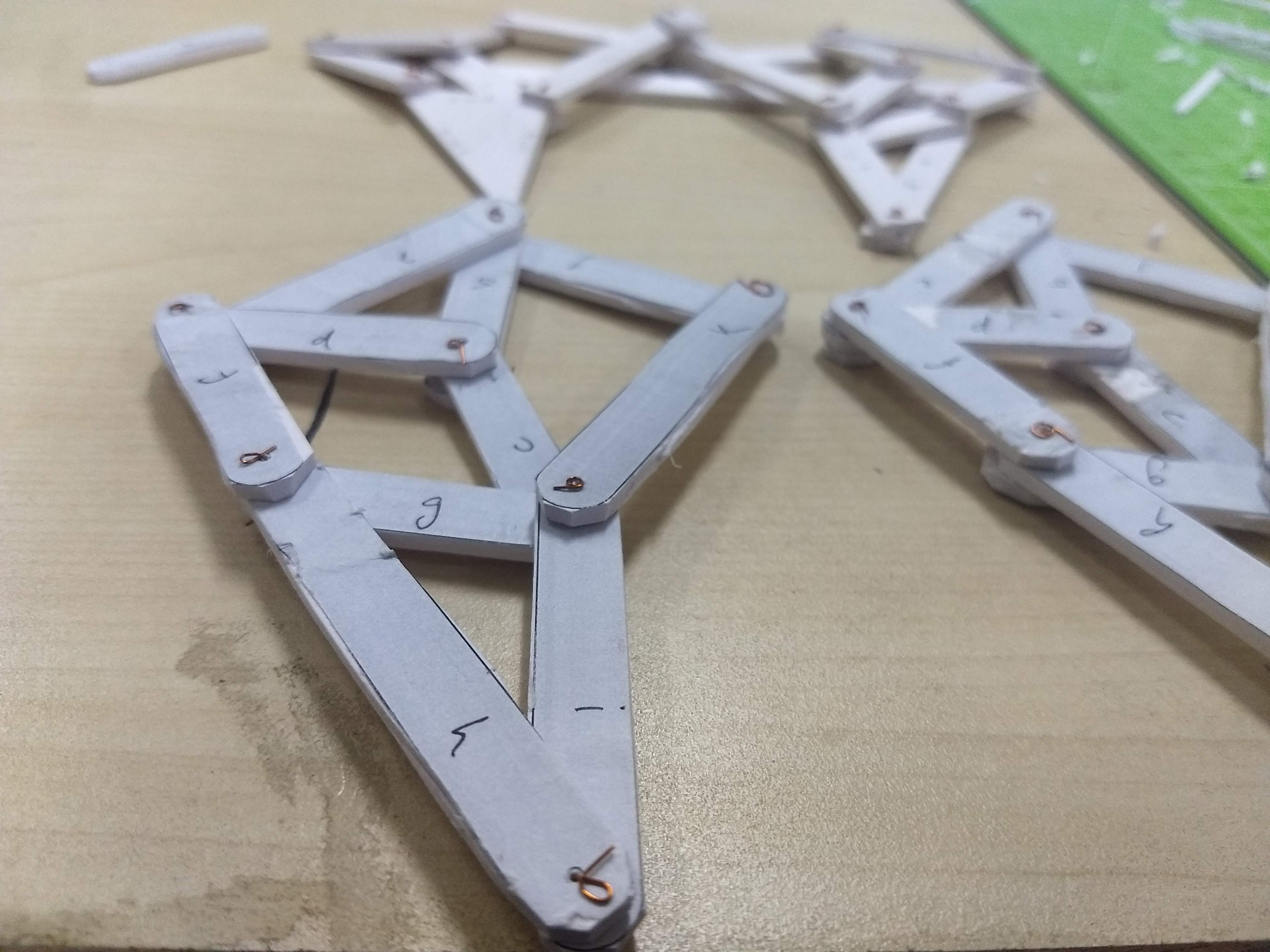
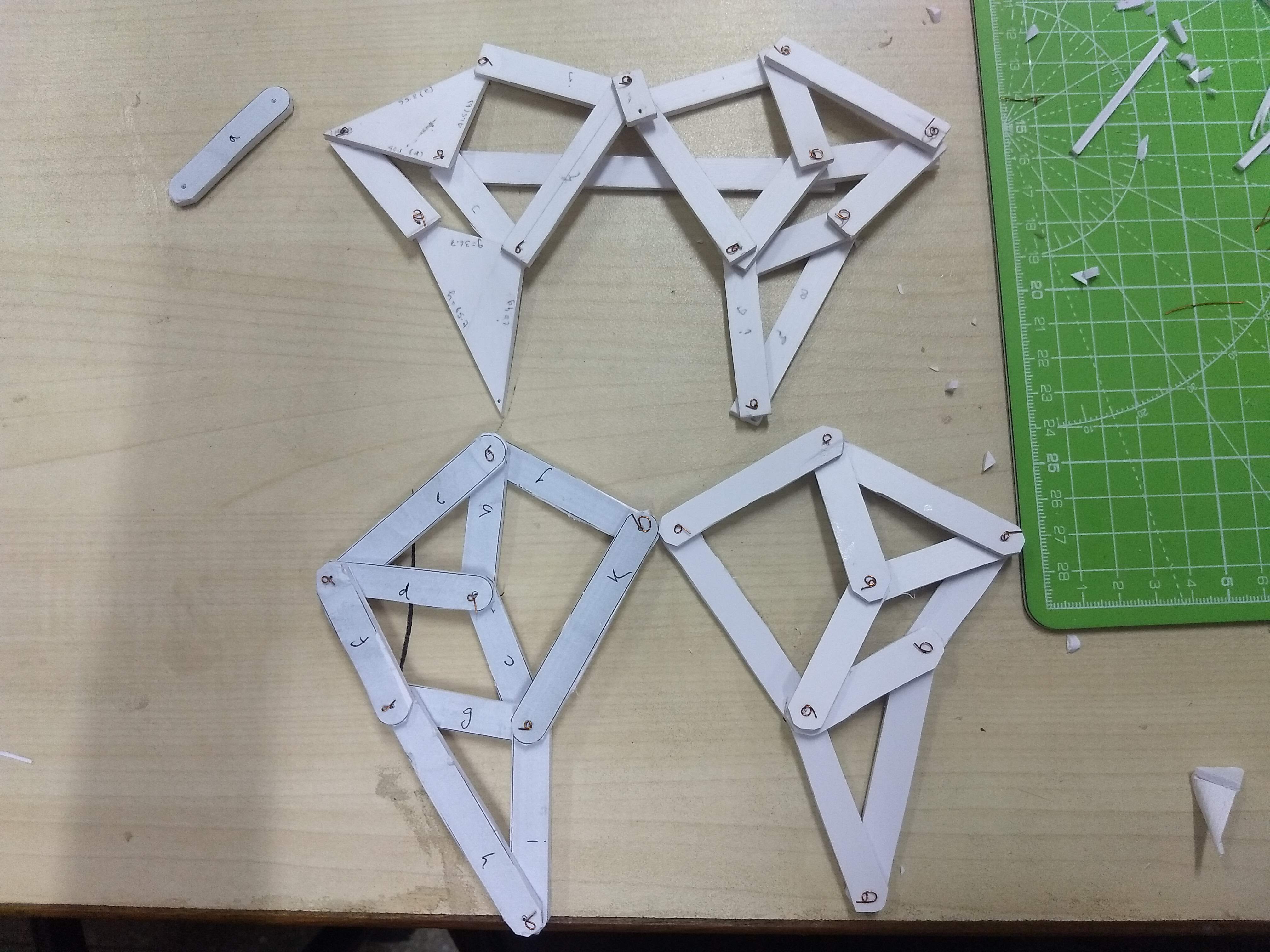
I along with Jude (@jtd) started to tinker around with the mechanism and here are some of the very preliminary attempts. Even though the project is work in progress ( we plan to make a small walking machine and then a larger one which a person can pedal), its movement captures the attention and imagination of people of all age groups!
We really look forward to the community members sharing their ideas, designs and artifacts with us here and also taking action locally by showing it to more people around. This is definitely going to bring gleam in the eyes and smile on the faces once anyone gets a chance to enjoy the sheer joy of playing(making) the mechanism!
I’ve posted a discussion on the subject of vehicles here, and explored some reasons why the Jansen innovation is not ideal for a practical mobility device.
Jansen himself names his creations strandbeests (‘creatures who have evolved to live on the sea coast between high and low tide levels’) because his art helps to understand, or uses the paradigm of, the mechanisms and behaviour of living creatures.
The geometry of the Jansen design, as we saw in the construction of Adam Savage’s One Day Build, needs to be extremely precise, in order to deliver a working leg, whose foot describes a perfect circle.
However, tinkering with the help of precision laser cut components enables some modifications to be built in. For one, instead of describing a circle, a flattened oval can be used. Secondly, the axes of the oval can be made flexible, instead of fixed.
The purpose of the flexibility is to control the horizontal and vertical components of the leg movement. The flexibility of the vertical movement creates precise controlled movement over rough terrain, while the flexibility of the horizontal movement allows the entire assembly, which can therefore be more a mobility platform than a strandbeest, to turn.
This is a list of files (CAD drawings etc) explaining how to build, very similar to Theo Jansen’s modified triangles, a simple linkage to convert action in one direction to its exact perpendicular. This means that an action in one precise direction (for example, horizontal to the ground) can be easily divided into a combination of matching horizontal and vertical motions.
If the two are identical (the energy expended on each is exactly equal, for an equal period of time) the resultant motion will be a perfect circle.
Of course, the real world doesn’t need a perfect circle, or else I suspect most living creatures would have evolved to move using perfect circular motion. Rather, living creatures move in a manner that optimises the energy expenditure. Many of them are driven, similar to human limbs, by muscles that are simple linear motors, attached by linkages, to a network of bones and ligaments.
This isn’t, by the way, any kind of criticism of Jansen’s choices. It is clear that his objective in creating mobile art has always been different.
From separate discussions, we are discovering that there is a clear value contribution from adding intelligence into a mechanism.
The question is, how should this addition take place? The obvious way is to place some kind of computing centre, suitably programmed, to control the movement of the individual segments of the vehicle.
And, following the track of evolution of natural living beings, it turns out that there is a strong value to another approach. This is to add intelligence at each of the individual segments, that takes its data inputs from sensors installed in that segment. Additional data inputs can be added from neighbouring segments.
Rather than developing preconceived coding programmes to transform those data inputs into motion, though, it is meaningful to consider that the computers be programmed to heuristically develop action programs of their own.
The complete vehicle must be allowed to learn, in turn, how to make its segments work in tandem, in order to achieve a given objective (such as, move from here to there without knocking down anything in the way). To do this, perhaps one computing unit can be used to understand an overriding objective, allocating resources to all the segments in order to achieve that purpose.
Apart from the fact that the design has a long way to go before approaching the level of a vehicle for humans, it also looks very energy-wasteful — lifting that mass of double triangles for each step.
The dragon is actually displayed in the longer video on compliant mechanisms.
The mechanisms themselves are very closely allied to the Jansen leg, yet move towards optimising the balance between throw and lift needed for an obvious pedal walker.
As I suggested the other day, I find it both disturbing and yet somewhat fascinating that the elephant in the room is so large, and yet invisible, to other research teams.
The prototype walkers are limited right now by their slavish starting point of a rotary motor, but I think that is not the real problem. It’s really not such a big deal, using a rotary prime mover, given that excellent working ones are cheap and readily available for a standalone walking machine prototype.
I’m just guessing that they are not bridging the gap to a smooth walker machine because they haven’t seen the Shark Tank TV serial, where the combination of multiple legs (that model used rotating squares, but it is much of the same) delivers a smooth pneumatic wheel like feel. Even that development may have been reported in some academic research, but perhaps it isn’t.
Anyhow, once the design moves away from a rotary motor, it is trivial (for a human size prototype, and then a production model) to use human feet to directly drive the legs, probably using direct linear or near linear motion.